
Avancement fin mars
Deuxième point d’avancement méca/élec des robots :
MiniBot
Malheureusement pas beaucoup d’avancement pour ce pauvre petit robot.
· Les adaptateurs de roues Lego ont l’air pas mal.
 · Il manque une idée géniale pour implanter les essieux à l’avant (malheureusement ils tomberont sur la jonction entre le flanc du robot et son nez)
· Il manque une idée géniale pour implanter les essieux à l’avant (malheureusement ils tomberont sur la jonction entre le flanc du robot et son nez)

C’est clairement sur le chemin critique pour MiniBot. J’ai pensé à un adaptateur imprimé qui coulisserait sur la base des axes moteur et qui piègerait un boulon, je tenterai ça la semaine prochain.
GrosBot
· La pince est terminée. Il faut usiner le châssis pour pouvoir prendre un spot.

Il faudra également la mettre un peu au propre au niveau de la mousse mais elle est fonctionnelle
· Contrairement à ce que je pensais, les pinces ne seront pas suffisantes pour prendre deux spots. J’ai donc rajouté un système de centrage des spots.
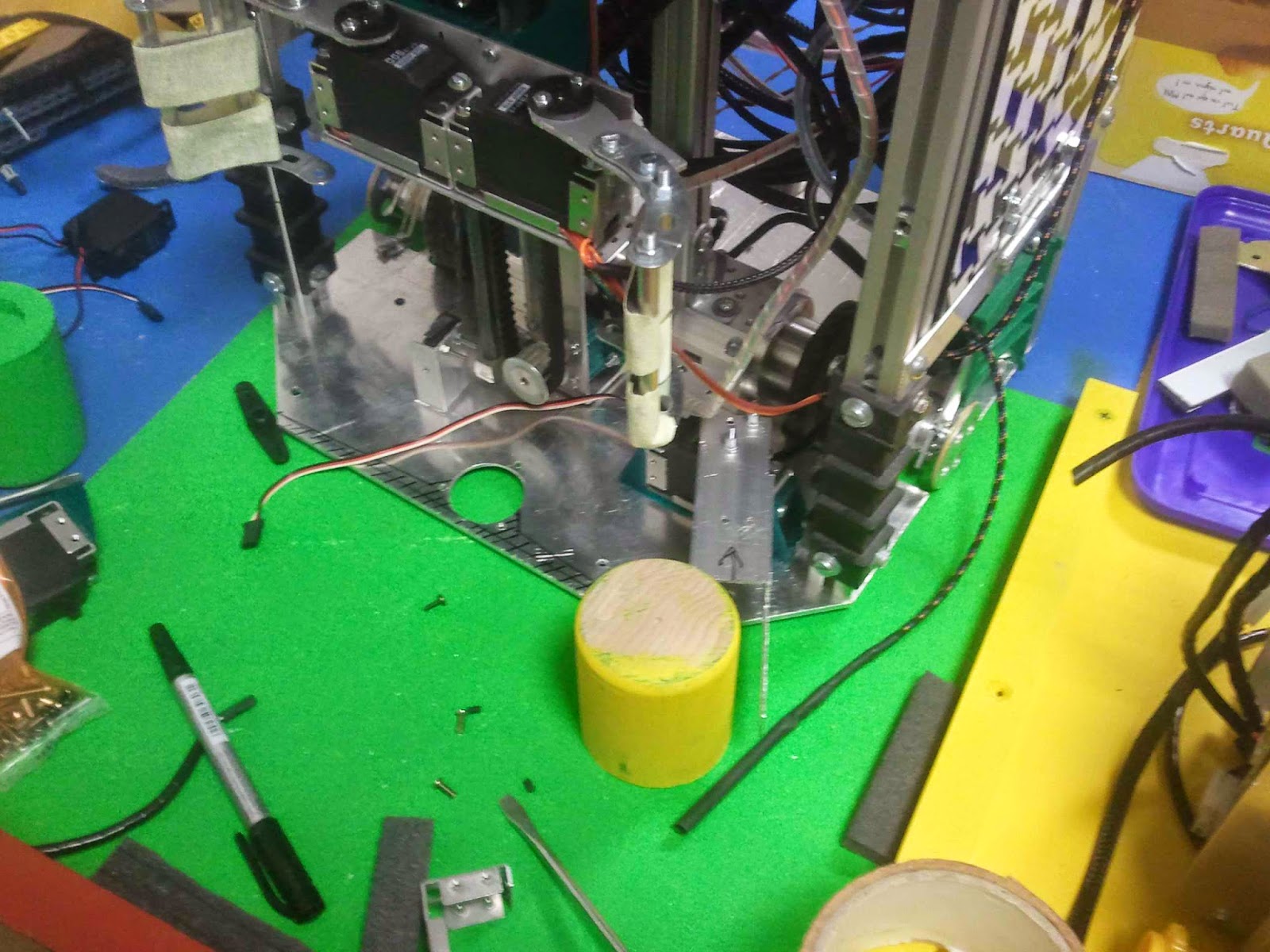
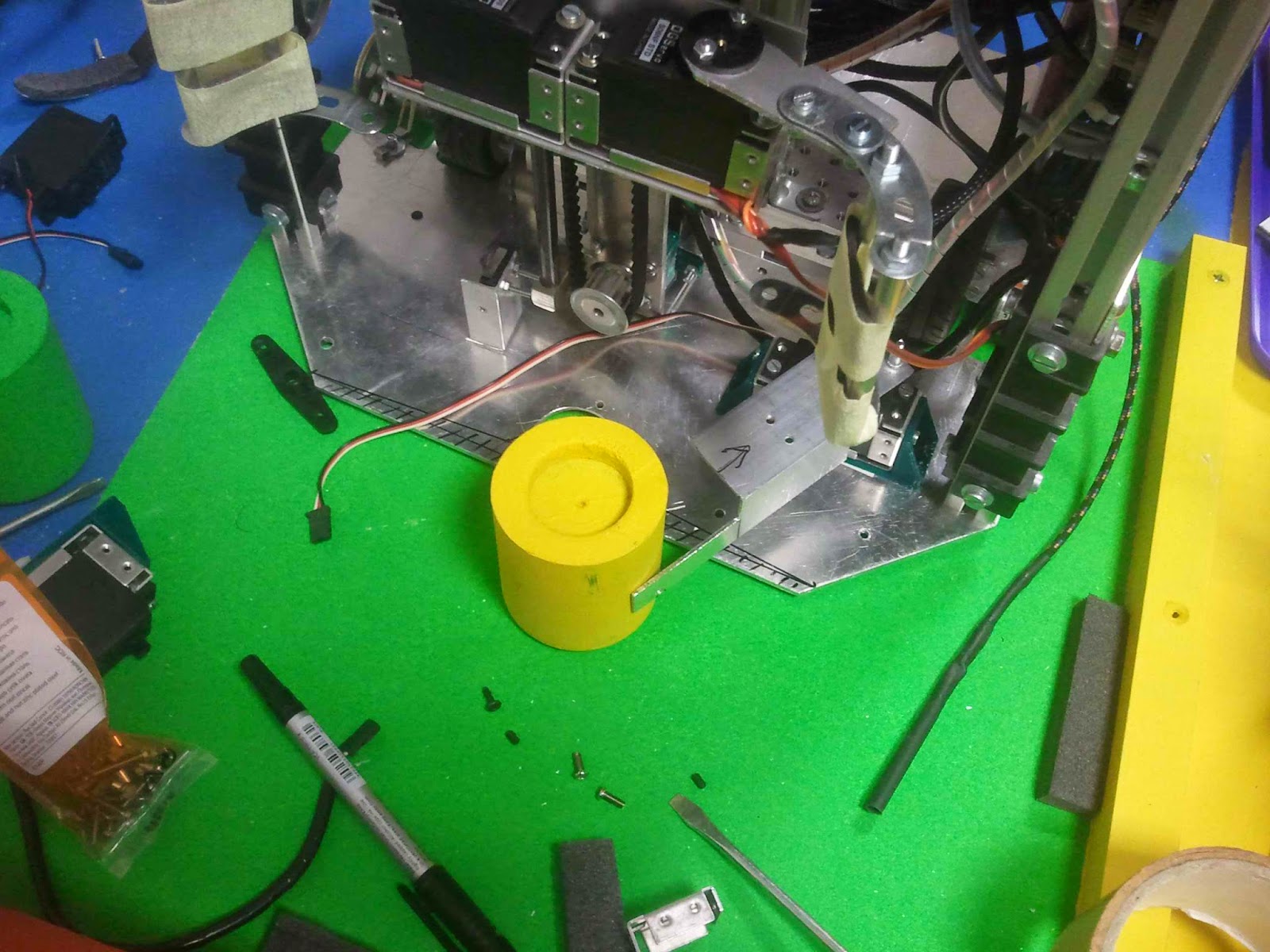

Pour intégrer les 2 servos du dispositif de centrage j’ai déplacé le capteur de fin de course au plus près de l’ascenseur. Il ne me reste plus qu’à acheter une cornière d’alu de 30mmx30mm pour terminer tout ça.

{kind=link}
· J’avais proposé à l’équipe de mettre de côté l’élaboration d’un dispositif pour prendre la balle de tennis dans la zone de départ. Dans les faits, nous en avons déjà un. Le plus grand des hasards fait que la pince a assez d’envergure pour choper la balle dès le départ, sans un mouvement du robot. 🙂 Par rapport aux photos, on gagnera encore quelques mm quand la base sera usinée pour les spots.


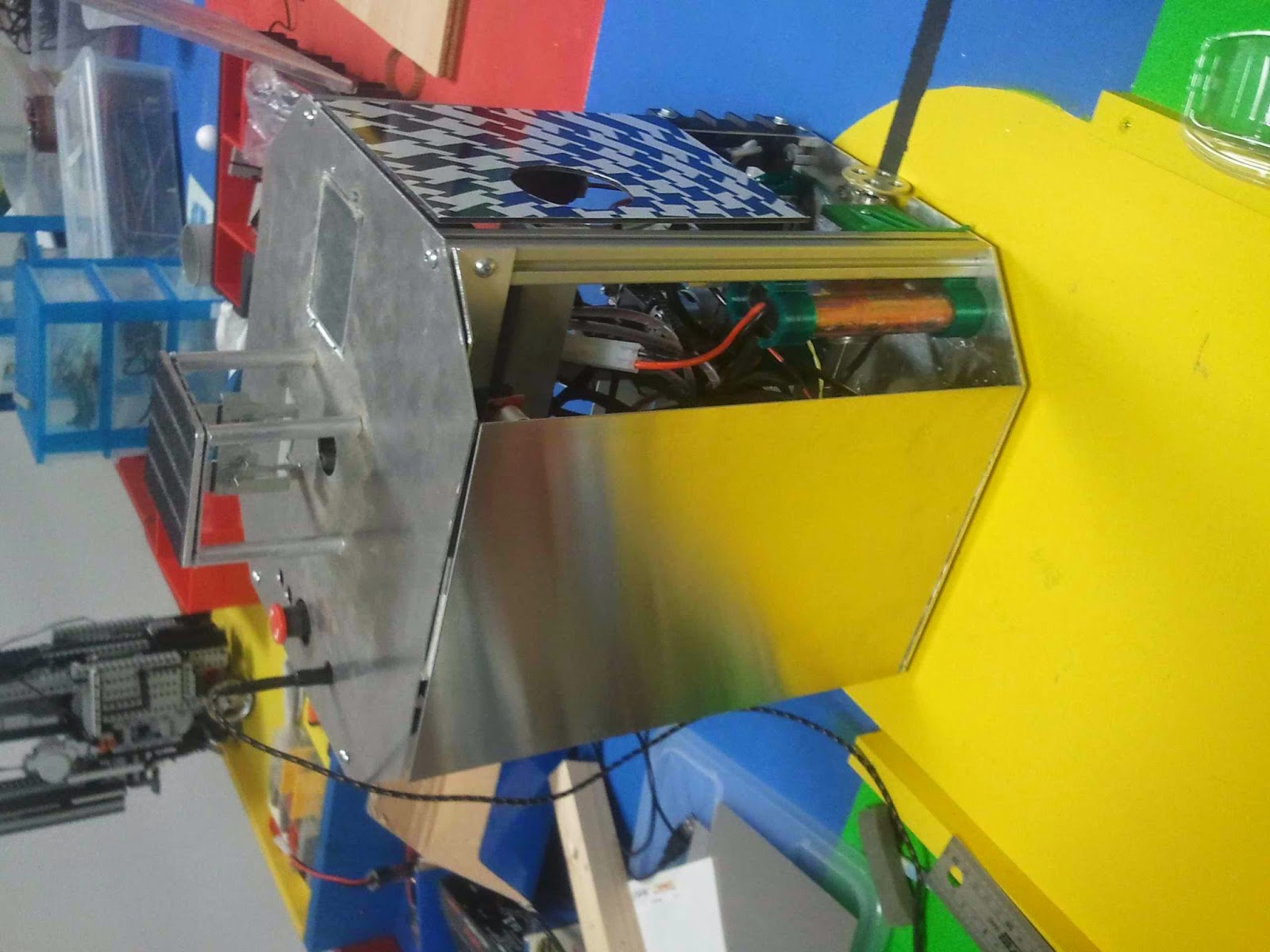
· Pour les gobelets, j’ai mis les deux équerres pour fixer la plaque qui acceuillera le dispositif de saisie et les volets à base de ventilos de PC. Je n’ai pas retrouvé la pince à rivets pour terminer le montage. 🙁

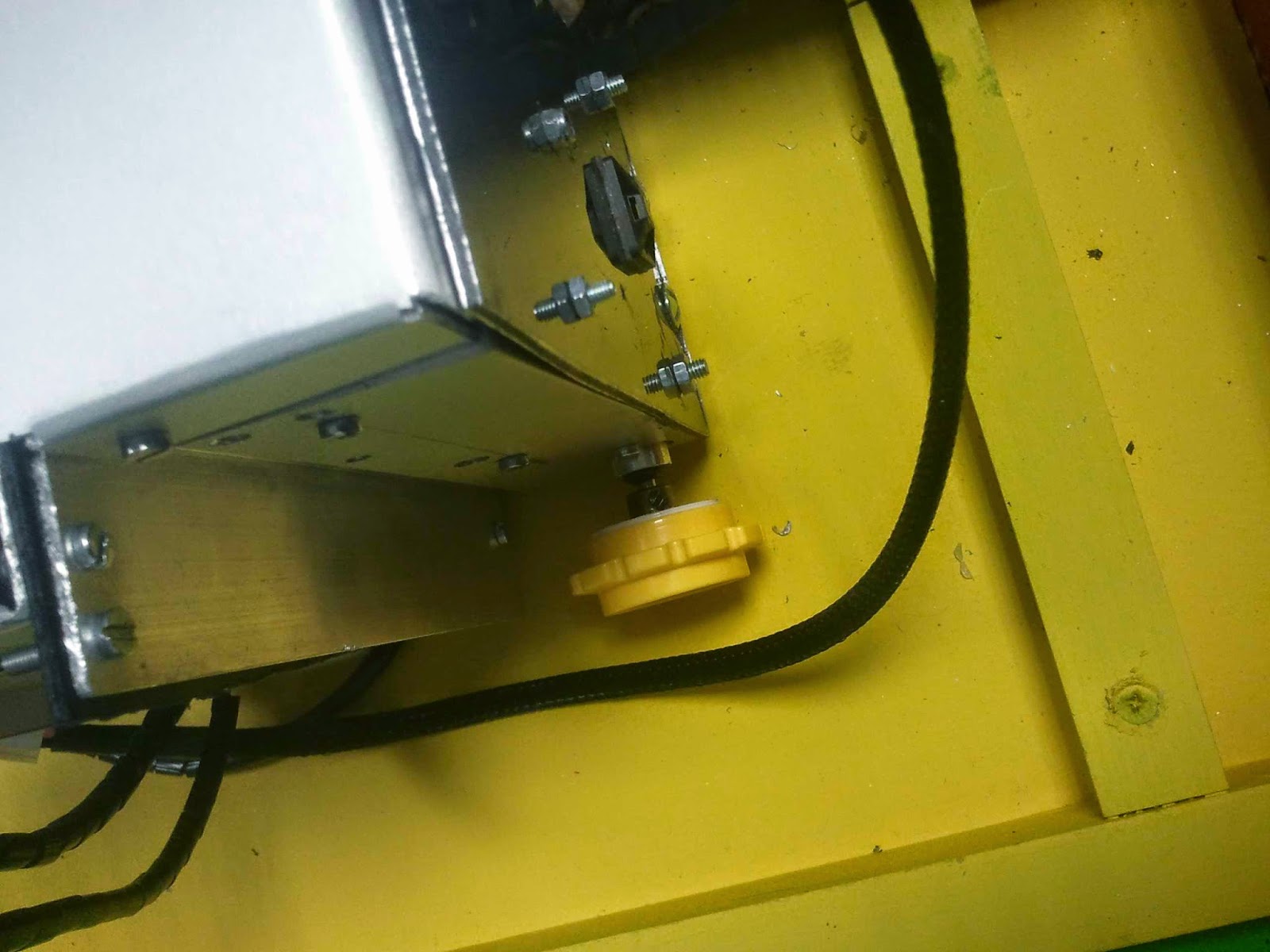
· Pour palier au démontage de la bille à l’avant, j’ai rajouté deux patins en téflon sous le robot (pour l’instant ils sont collés avec leur pastille adhésive). J’ai fait un test de mise en action : c’est bluffant ! En marche avant (car il reste une bille à l’arrière), le déplacement du robot est silencieux et à l’air plus fluide (c’est une remarque très subjective j’en conviens). Ça n’a pas l’air en tout cas de perturber l’asservissement.
· Enfin, j’ai essayé de tester les SW de Nico. LaBotBox compile et se lance impeccablement. J’arrive à créer la liaison RS232 entre le mbed et le robot. Mais je dois avoir un problème avec mon compilateur gcc4mbed car le soft du mbed ne répond pas (il ne se lance même plus en mode autonome). J’ai reflashé un ancien soft pour conserver un robot fonctionnel. Je ferai des tests plus poussés demain.