
Réunion CRLG Décembre 2025
Présentation des projets CRLG en concurrence pour la coupe de France de Robotique 2025
Principe des projets CRLG
Traditionnellement, chaque année, après la sortie du règlement de la coupe de France de Robotique, au sein du club nous formons quelques petits groupes qui réfléchissent chacun de leur côté à des solutions d’actionneurs pour exécuter les actions du règlement.
Les solutions sont mises ensuite en concurrence à la fin d’année et on choisit les plus prometteuses pour la coupe. Ainsi chacun laisse parler sans frustration son génie créatif et nous mettons tout notre effort collectif sur une seule solution pour une efficacité absolue lors de la coupe.
Cette année, les groupes pouvaient proposer 3 solutions pour :
Préparer la salle de concert:
Les robots doivent ramasser les colonnes et plate-formes présentes sur la table et fabriquer les gradins dans les aires de construction avec ces colonnes et plate-formes.
Assurer la promotion du spectacle:
Déployer une banderole fabriquée par l’équipe sur le devant de la table.
Action Superstar et Groupies:
Les groupies et la superstar doivent maintenir un actionneur en mouvement et visible depuis le public
après la fin du match ; tout en restant immobile pour être considérée comme faisant la fête.
après la fin du match ; tout en restant immobile pour être considérée comme faisant la fête.
Actionneurs présentés par Bichon
Préparer la salle de concert:
A base d’aimants et d’un crochet pour la planche du dessus. Deux colonnes sont récupérées à l’intérieur du robot. Il n’y a pas de dispositif d’empilement des gradins.
Assurer la promotion du spectacle:
À l’aide d’une vis sans fin, un crochet est desserré et libère deux morceaux de mètre à ruban sur lesquels est accroché la banderole.
Action SuperStar et Groupies
Pas de proposition
Actionneurs présentés par Tom, Nico et Ben
Préparer la salle de concert:
À base de pinces actionnées par des moteurs pas à pas. Les pinces seront fixées sur un ascenseur pour pouvoir empiler les gradins.
Assurer la promotion du spectacle:
Deux barres, sur lesquelles est attachée la banderole, reliées par une liaison élastique (pièce imprimée) se déploient en s’ouvrant comme un livre
Action Superstar et Groupies
Pas de proposition
Actionneurs présentés par Delphine et Laguiche
Préparer la salle de concert
à base d’aimants fixées sur un ascenseur pour pouvoir empiler les estrades. Les colonnes (boîtes de conserve) sont relâchées par des petits vérins).
Assurer la promotion du spectacle:
Deux tubes, sur lesquels est attachée la banderole, reliés par une liaison élastique (ressort) se déploient en s’ouvrant comme un livre
Action Superstar et Groupies
Un bonhomme gonflable sur un petit ventilateur de PC
Actionneurs choisis pour la coupe de Robotique 2025
Suite à la présentation des projets en concurrence, aucun choix absolu n’a été fait, c’est en fait un mélange des différentes propositions.
Préparer la salle de concert
On a fait le choix d’un robot qui empile les gradins.
On a également remarqué par divers essais et réflexions que:
- il est très dur de bouger les boîtes de conserve sans faire bouger les planches et inversement
- il est difficile de monter les boîtes de conserve avec des aimants s’il y a plusieurs planches
- il est très dur d’utiliser un seul dispositif pour tout faire (bouger les éléments, les dissocier et les empiler)
- les pinces peuvent s’ouvrir à l’extrême et être stockée entièrement dans le robot
- les pinces doivent ne pas être sur le même plan pour pouvoir saisir deux boîtes de conserve côte à côte
Donc on a conservé les idées suivantes:
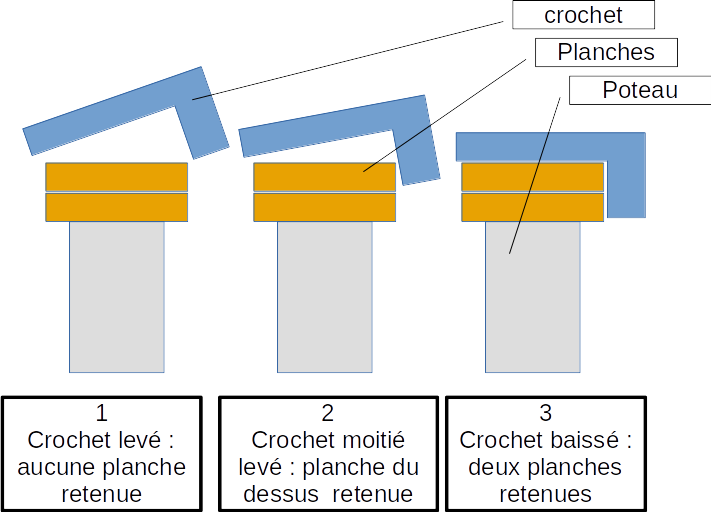
- crochet (Cyril)
- pinces (Tom/Nico/Ben)
- ascenseur (Tom/Nico/Ben/Delphine/
Laguiche) - aimants avec demi lunes et vérins (Delphine/Laguiche)
Synthèse:
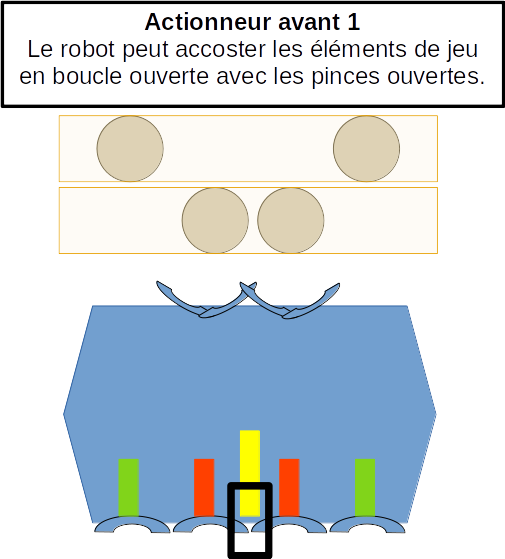
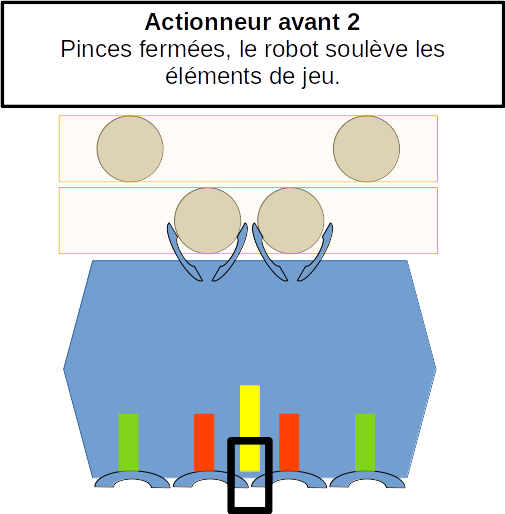
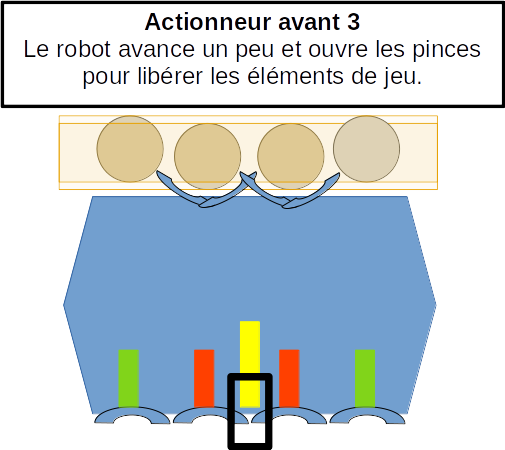
L’avant du robot est dédié à lever un gradin sur un autre et à déposer la banderole.
La partie fonctionnelle avant du robot est composée d’un ascenseur avec deux pinces afin d’attraper les deux colonnes centrales. L’ascenseur est piloté avec un servomoteur fixé sur la partie mobile et une crémaillère au dos du rail. Il n’y a pas d’asservissement de position. Les hauteurs à atteindre seront identifiées avec des contacteurs.
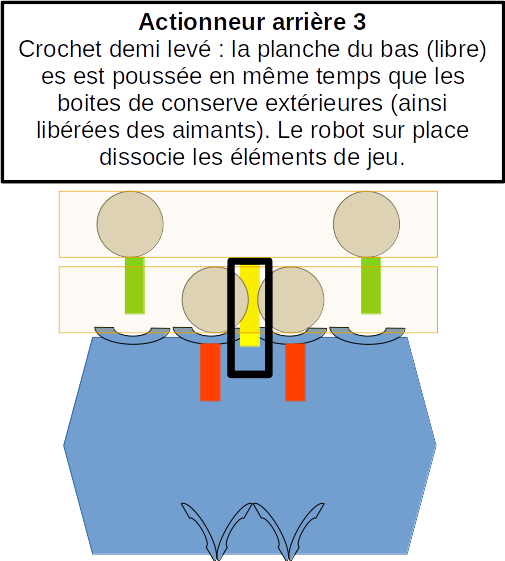
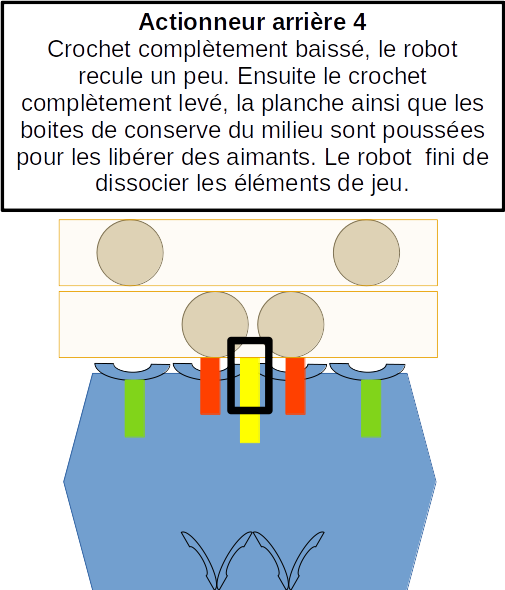
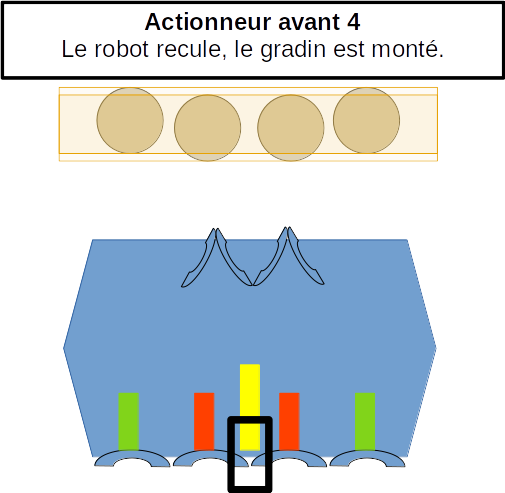
L’arrière du robot est dédié au déplacement des gradins et à leur dépilement.
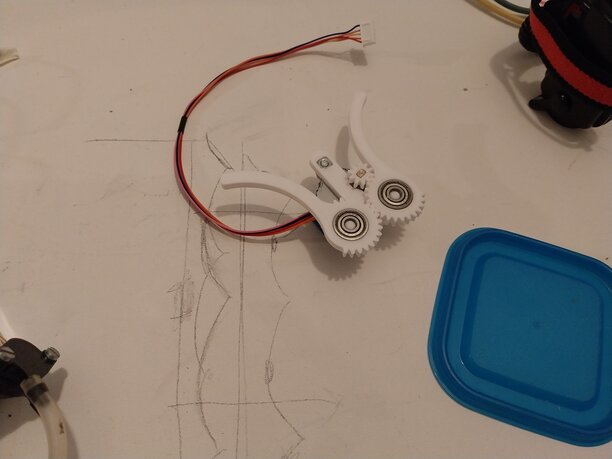
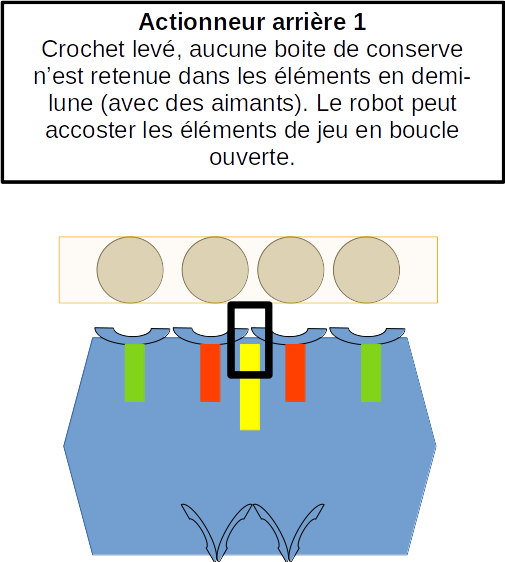
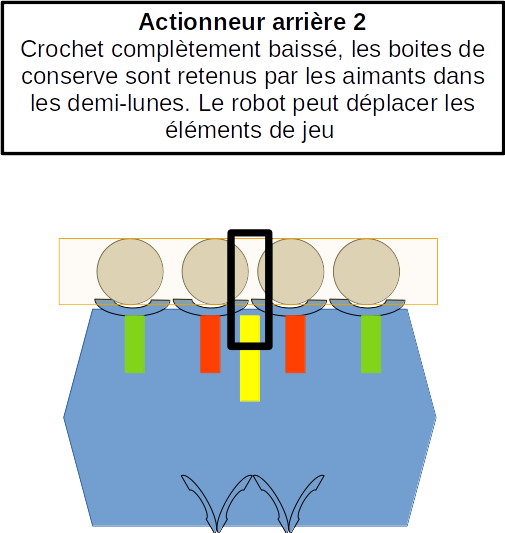
La partie arrière est composée d’une pièce épousant les formes des quatre colonnes avec des aimants. Au-dessus, deux parties mobiles permettent de pousser les deux colonnes des extrémités. L’arrière du robot permet de déplacer les gradins dans la zone de construction et de les dépiler en maintenant la plateforme du haut à l’aide d’un crochet pendant que la plateforme du bas est poussée par un vérin en même temps que les deux colonnes des extrémités.
Exemple de séquence pour préparer la salle de concert:

Assurer la promotion du spectacle
On a conservé l’idée de deux éléments reliés par une partie élastique. On a testé le même principe que les tubes de tente avec un élastique en tension reliant les 2 tubes. Un proto était presque prêt en fin de séance.


Action Superstar et Groupies
Bonhomme gonflable retenu
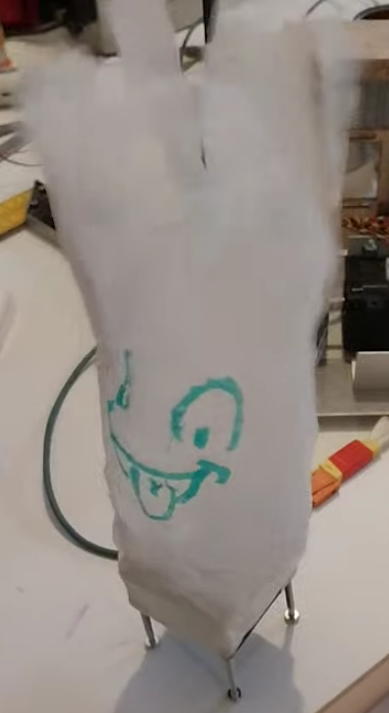
Nous avons même testé la solution de la funny action de 2017 avec un ventilateur et une boule de polystyrène. ça a presque fonctionné…. affaire à suivre.
Autre travaux en cours
Conception PAMI
Proposition d’intégration d’un PAMI par Tom. Intégration des codeurs à repenser. Cela nous a tout de même permis de vérifier que les moteurs étaient assez puissants pour monter la rampe et que la vitesse était suffisante pour que la superstar et les groupies atteignent leur but.
Amélioration du robot legacy
Alex a réusiné les roues. Un pneu était déjà en cours de séchage en fin de journée
Rappel:
Nous avons opté depuis l’année dernière pour des pneus fabriqués maison avec du silicone du commerce (pour faire les joints) et de la maïzena. La solution était convenable mais les pneus avaient tendance à déjanter. Nous avions donc décidé d’usiner une gorge dans les roues en aluminium (il y avait a priori assez de matière pour cela) et de tester un renforcement des pneus avec de la toile (type bande à joint grillagé pour placo) pour éviter leur étirement.

Changement d’archi électronique: Mbed vers STM32
Les travaux sur les STM32 avancent à grand pas!
Nico est à la manoeuvre. Même si un gros travail a été réalisé pour le STM32H755 (prochain article à paraître) qui remplacera notre mbed dès 2025, Nicolas a beaucoup travaillé avant la fin d’année sur le STM32G431 qui sera le coeur numérique des PAMI afin de permettre aux jeunes d’avancer rapidement sur leurs travaux.
Pour cela, il a créé:
- le projet KICAD (https://github.com/CRLG/HW_
ELECTROBOT-G431) qui contient les empreintes du STM32G431 pour que les jeunes puissent commencer la création du PCB des PAMI. - les projets QtCreator (https://github.com/CRLG/PAMI_
1 & https://github.com/CRLG/PAMI_2 ). La structure du programme est très similaire à notre robot legacy permettant aux jeunes d’avoir le choix soit utiliser une brique de base (stratégie, asservissement, couche de comm,…) soit de coder leurs fonctions « from scratch ».
Il nous expliquera le détail de ses travaux lors de notre prochaine rencontre. Mais en attendant, les jeunes qui s’occupent des PAMI, Tom, Lazare et Erwann: A VOUS DE JOUER!
