
Réunion CRLG Décembre 2025
Présentation des projets CRLG en concurrence pour la coupe de France de Robotique 2025 Principe des projets CRLG Traditionnellement, chaque année, après la sortie du règlement de la coupe de France de Robotique, au...

Présentation des projets CRLG en concurrence pour la coupe de France de Robotique 2025 Principe des projets CRLG Traditionnellement, chaque année, après la sortie du règlement de la coupe de France de Robotique, au...
Tout d’abord, nous accueillons dans l’équipe un nouveau venu : Tom! Programme de la journée passée: Discussion générale Pizzas Découverte du règlement en live « The Show Must Go On« Organisation de l’année à venir...
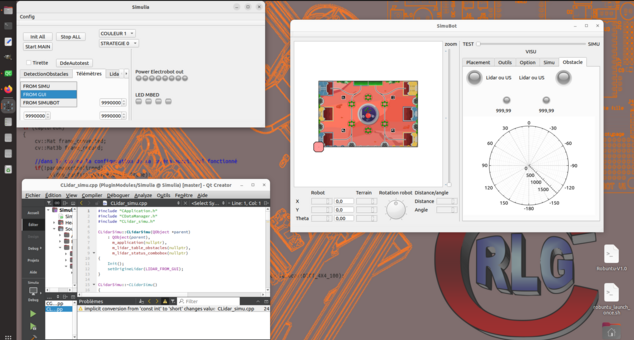
Le club a à sa disposition un environnement de développement contenant tous les outils permettant le développement de nos robots. Il s’agit, en fait, de la distribution Ubuntu paramétrée spécifiquement pour le club par...

Mauvais classement cette année pour le club. Il y avait de fait beaucoup de découverte cette année pour les nouveaux/jeunes du club avec bien entendu des erreurs de débutant. Ce qui n’a en rien...
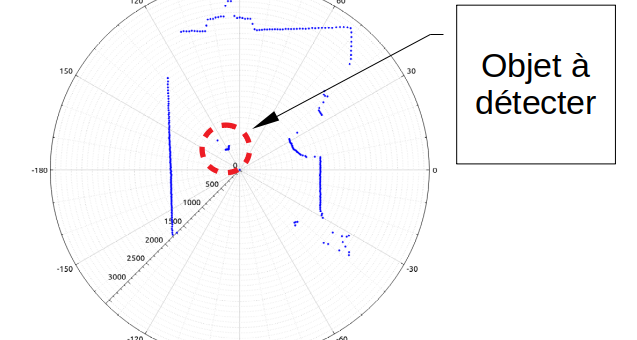
But du filtre Le filtre « tracker » est conçu pour filtrer les données brutes du lidar en scannant les données mises bout à bout. Le filtre traite donc les données distance les unes après les...
Cette dernière de l’année 2023 était encore une fois très sympa. C’est toujours un réel plaisir de se retrouver et puis, on a pris de l’avance sur la galette des rois et nous avons pu...

Samedi de réunion mensuelle du club. Au programme: un bon test Lidar et du prototypage dans tous les sens. Site internetDelphine poursuit le site et se propose de remettre en route le sponsoring. Merci...
Après un point cialis prix complet sur le lidar, l’archi cible pour ce dernier est: Le traitment des infos du LIDAR sont faites dans la Rapbserry La Rasb donne une informaiton déjà prémachée au...
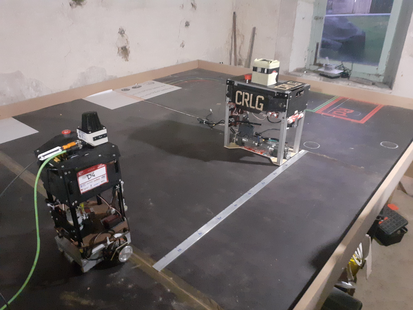
Petit point technique et d’organisation ce midi avec Benjamin, Stéphane, Alex, Nico. Projet Détection/Évitement d’obstacles : -Communication avec le Lidar OK depuis Labotbox. Le driver de communication est développé en supposant que le Lidar...

Problématique Chaque année à la coupe de France de Robotique la détection d’obstacle est problématique : détection tardive des adversaires ne permettant pas un évitement acceptable détection impossible (sur le flanc des robots par exemple)...