C’est la rentrée pour CRLG
Avant de partir en congés, nous avions lancé quelques projets d’été alors comme c’était la rentrée des classes, le moment est venu de partager les devoirs de vacance.
Nico et Alex ont bossé sur le projet « réalisation des cartes électroniques« , et les vacances ont été bénéfiques pour le club.
La démarche a été :
1. Recherche d’un bon logiciel gratuit de saisie de schéma/routage disponible sur plusieurs plateformes Windows/Linux/Mac
-> La conclusion de ces recherche est incontestablement KICAD (totalement gratuit, fonctionne sur toutes les plateformes, grande communauté de développeurs de composants, export très facile pour la mise en fabrication). Nico ayant déjà fait du routage sur d’autres logiciels, il ne lui a fallu que quelques heures pour maîtriser le logiciel et sortir une première carte de test.
-> Le résultat de ces recherches est incontestablement le site Chinois JLCPCB déjà utilisé par Alex pour la réalisation des nos cartes PowerSwitch cette année.
On arrive à des prix de PCB défiant toute concurrence (on est dans l’ordre de grandeur de 50 centimes d’euros par PCB) avec une très bonne qualité de fabrication, sérigraphie sur les 2 couches, trous métallisés, pastilles étamées.
Les délais de réception sont une petite dizaine de jour. Rien à redire.
3. Mise en place d’une librairie de composants/empreinte fréquemment utilisés pour le club.
-> Cette lib s’appelle KICAD_LIB sur notre github et héberge les composants comme : MBED, DSPIC, connecteurs XT30, XT60, TRACO, connecteurs MOLEX, régulo, …
4. Prise en main de l’outil et réalisation des premières cartes :
Les 2 premières cartes réalisées sont :
AXIFACE : disposer du retour d’info des servos moteurs AX (position, température, …), avoir un hub de connectique AX, fournir la puissance régulée.

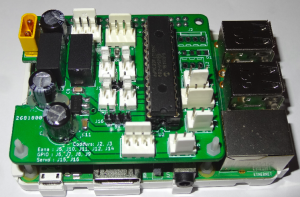
POWER_ELECTROBOT : fusible / hub de distribution des alimentations / 8 sorties de puissance commutables / mesure de courant / mesures de tension / alimentation 5V pour la raspberry
Carte en gestation dans les esprits :
Pont en H avec régulation de tension intégrée pour un meilleur comportement des déplacements du robot, indépendant de la tension batterie.
Hub XT30
Tout est à jour en partage sur notre github :
Pour distinguer les projets de réalisation de cartes des autres projets logiciels, les noms des dépôts git sont préfixés par « HW_ »