
Mars attacks!
On est en Mars, il est temps de mettre les bouchées doubles si on veut pouvoir faire quelques tests avant la coupe :-p
GrosBot
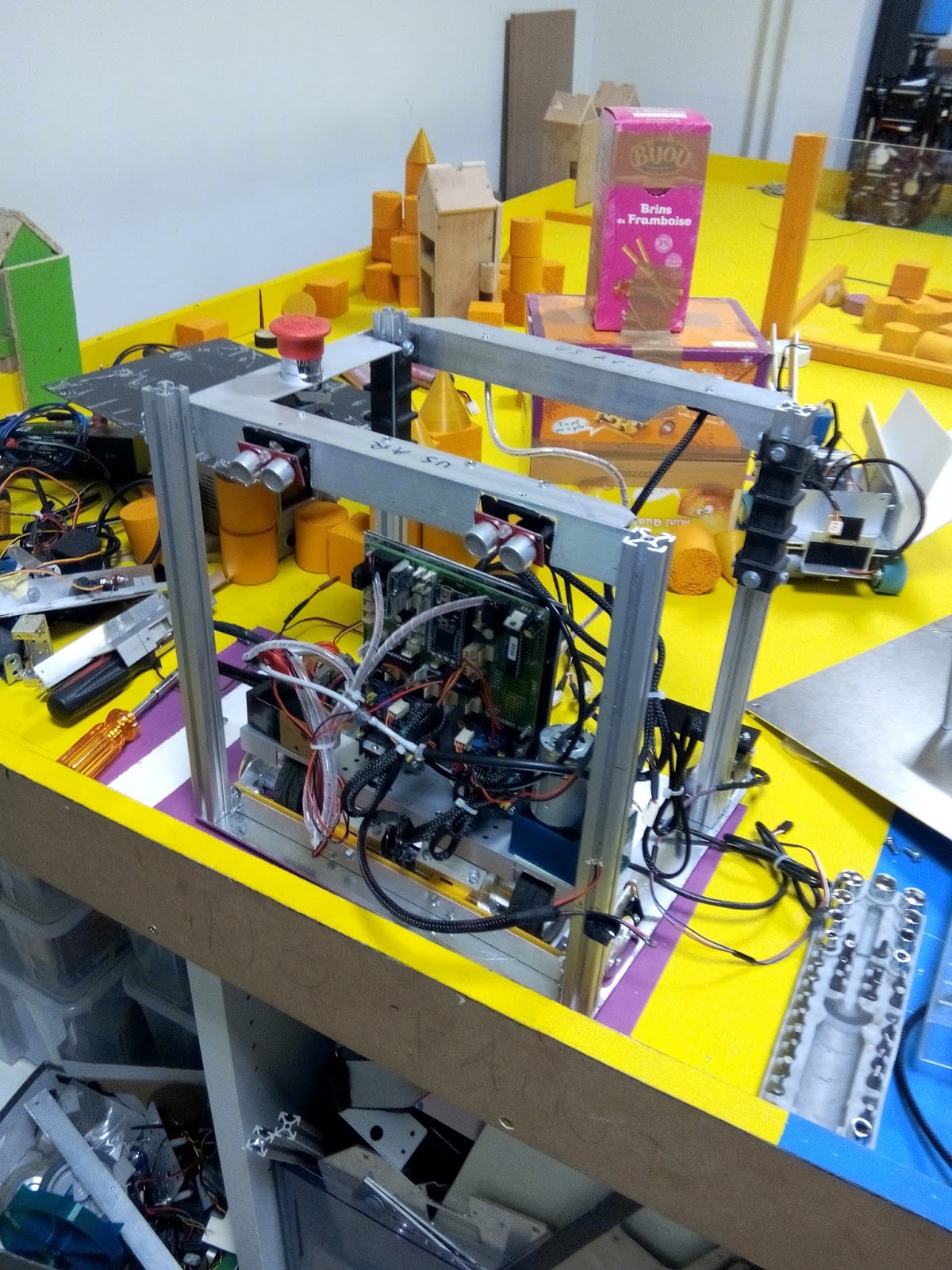
La méca/intégration principale est en cours de finalisation:
- base roulante intégrée
- électronique intégrée
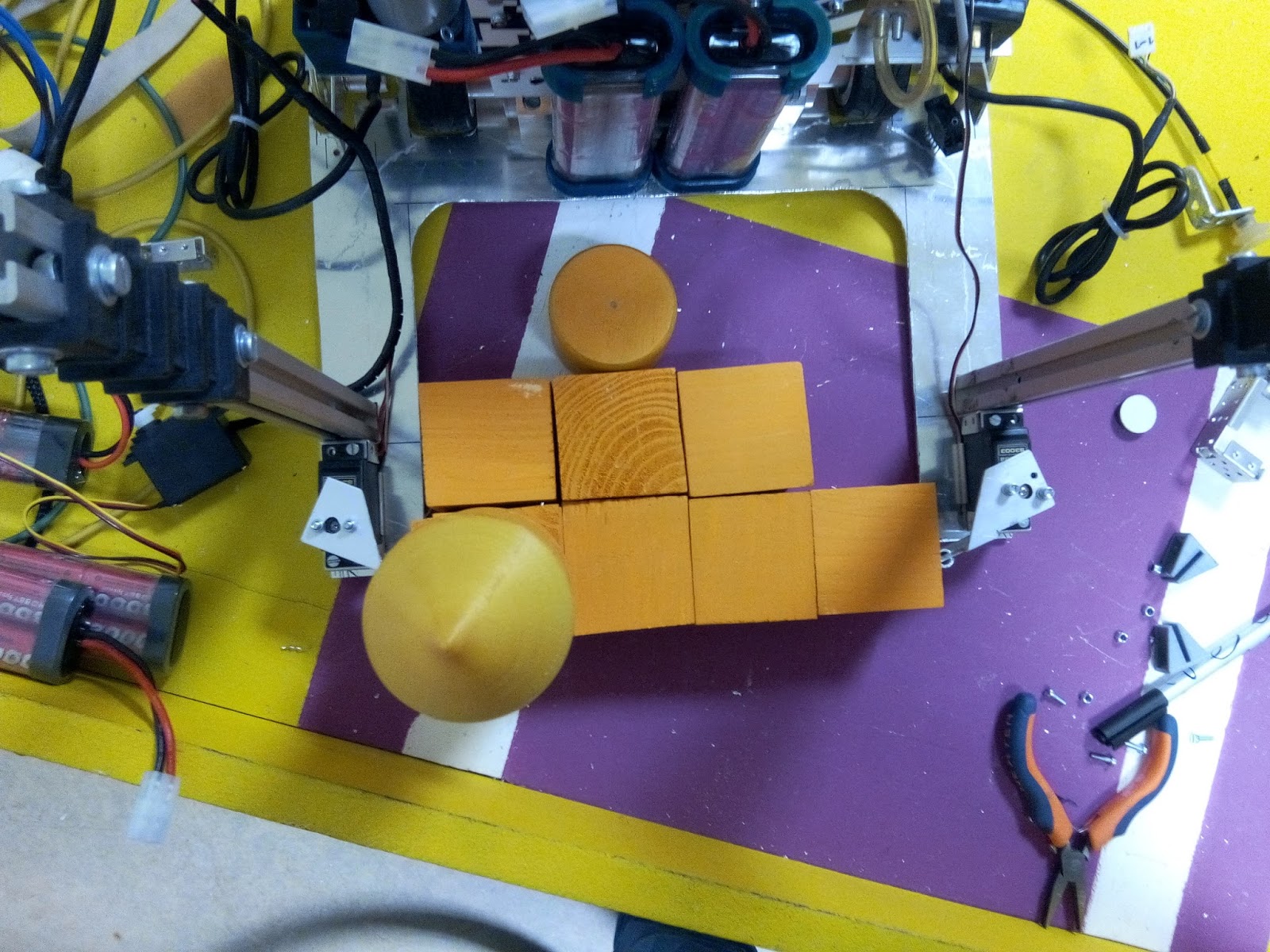
- une partie du système de ventouse intégrée
- les pinces intégrées (sûrement un réusinage à faire car les pièces plastiques semblent un peu trop « souples »)
- support balise intégré
- BAU intégré
- capteurs ultra-sons intégrés
Bref ça commence à avoir de la gueule. Si j’arrive à souder avec mes 2 mains gauches on reprend les essais dynamiques dès la semaine prochaine.





 |
| En tout cas, il y a de la place! |
MiniBot:
La conception est relancée et se prend une grosse claque! 🙂
Laurent peaufine la base roulante avec une suspension ingénieuse pour les codeurs (gain de place assuré):



Du coup il ne reste plus que quelques ajustages pour intégrer la base roulante. Le reste sera, en partie, de la réutilisation de l’année dernière.

Divers
Comme on aime les challenges à CRLG et qu’il nous reste énormément de temps, peut-être intégrerons-nous notre défis de la semaine dernière: balise lidar.
Il reste un chouille de messagerie et à optimiser un peu le temps de balayage, mais ça marche déjà pas trop mal (pour un montage/logiciel fait en 3 jours)! 🙂
