Avancement début avril
MiniBot:
Bon l’idée géniale pour accrocher les essieux avant a été trouvée: on pique des légos à BrickStory et on les visse bien serrés au chassis! 😀
Bref, en répartissant le poids convenablement pour éviter les pirouettes sur l’escalier et en pilotant les moteurs directement via l’alim régulée: MiniBot monte les marches!
Après il faut juste bien régler l’asservissement avec les codeurs intégrés aux axes moteur, se positionner tout seul devant les marches, les monter et poser les tapis en cours de route: une paille! 🙁
Mais à 1 mois et demi de la coupe, on est grave en avance! 😀
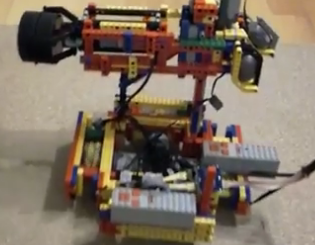
GrosBot
Une « petite » soirée de début de week-end, nous a permis de fignoler la méca de la pince et de tester les actionneur avec notre logiciel de contrôle par PC (fini par Nico). Outre le beau bordel (vive l’entropie de la robotique: il n’y a qu’à voir le bordel dans les stand de la Ferté 5 min après l’installation des équipes :-p) qu’on a foutu dans ma cuisine




la pince semble prometteuse:
(en passant on s’entraine pour les nuits blanches de la coupe! :-D)
De même pour le popcorn: changement de stratégie. Vu la bazar provoqué par la manipulation des verres lors des Trophées de la Robotique et la complexité pour aborder les verres et les trimbaler à droite et à gauche, nous nous concentrerons sur les distributeurs afin de tout stocker dans le robot et recracher les popcorns dans la zone de départ pour éviter l’indigestion:
Seule la méthode pour récupérer les popcorns dans les distributeurs risque d’être originale, mais ce sera pour une prochaine fois 😉