
Un support de balise pour l’an prochain
Après plusieurs années de participation à la coupe de France de Robotique, nous avons remarqué qu’il nous manquait un élément essentiel à notre progression, le repérage de l’adversaire sur le terrain. On le détecte quand il est juste devant mais il nous est impossible d’avoir une stratégie plus globale prenant en compte les endroits où il ne faut pas aller car l’adversaire y est présent.
Une longue réflexion nous a mené à choisir la solution de la balise fixe, en bordure de terrain. Cette balise sera équipée d’une camera et d’un système sans fil permettant la communication avec le ou les robots. La caméra repèrera une balise ayant une signature particulière posée sur le(s) robot(s) adverses
Selon le règlement, cette balise doit être autonome en énergie, et entrer dans un périmètre de 80x80mm de base pour une hauteur maximale de 160mm
Nous avons réalisé cette année une balise prototype sur ce principe pour faire de l’acquisition d’images afin de préparer le traitement à venir. Cette balise a été déssinée lors de la Coupe de France 2015 à l’aide du logiciel DesignSpark et imprimée avec notre grosse imprimante semi défectueuse :
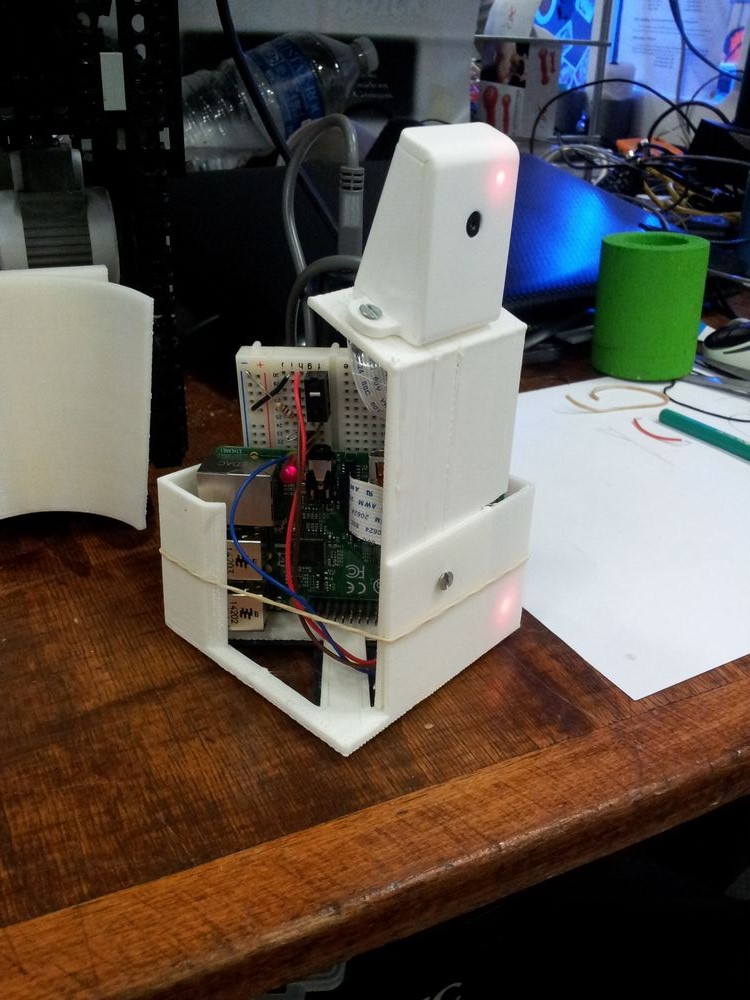 |
| Balise 2015 |
Nous avons donc choisi de repartir sur les mêmes bases et d’utiliser un Raspberry PI avec un module RaspiCam, pour la simplicité de l’intégration. Au cahier des charges, il nous faut également
- Des interrupteurs pour lancer la prise d’image, l’analyse et la transmission de données
- Des LED d’état de la communication, de la caméra, etc…
- Une alimentation stabilisée 5V
Pour les deux premiers points, nous avons opté pour un écran tactile LCD, de la taille du Raspberry PI, qui va jouer le rôle d’IHM complète. Nous pourrons ainsi
- Visualiser l’image de la camera
- Visualiser le traitement
- Calibrer la caméra en fonction de l’éclairage
- Vérifier la communication avec le(s) robot(s)
- Lancer l’analyse et la transmission de données
Pour l’alimentation, nous utiliserons une batterie externe pour téléphone portable (5V, 2000mAh, connectique USB) qui a l’avantage d’être immédiatement compatible, rechargeable n’importe où, régulée et peu onéreuse.
Le boitier de toute cette instrumentation a été réalisée avec DesignSpark, outil qui a l’avantage de nous proposer une bibliothèque d’objets 3D déjà conçus comme le Raspberry PI, la raspiCam. Nous gagnons donc du temps dans la conception.
Voici une vision de ce que cela va donner :
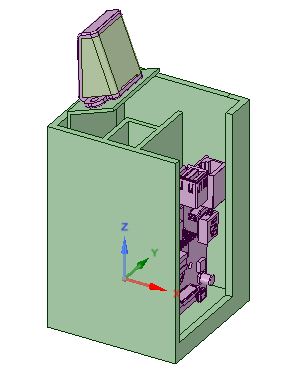 |
| Vision globale de la balise |
 |
| Implantation vue de dessus |
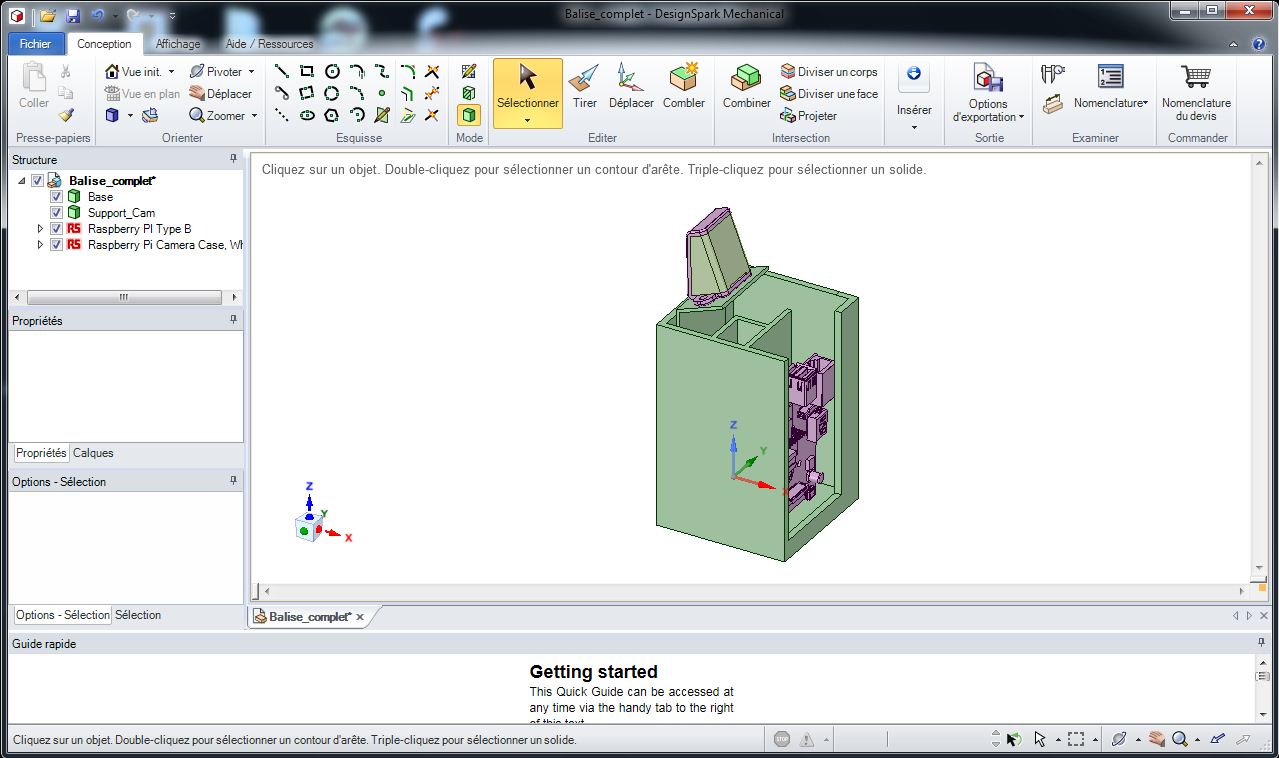 |
| Le travail sur DesignSpark |
En rose, les éléments fournis par DesignSpark, qui nous permettent de modéliser l’ensemble et vérifier que tout va bien matcher.
Pour la partie communication, nous travaillons en parallèle sur des modules 2.4GHz qui fonctionnent plutôt bien … sans les perturbations de la coupe!!!
Nous remercions notre partenaire RS qui nous octroie une réduction conséquente liée à notre participation à la coupe, et qui met à notre disposition le logiciel DesignSpark.