Premiers tests avec le LIDAR Sick
Nico a alimenté le LIDAR, l’a connecté avec un câble Ethernet M12 commandé auparavant et hop, le LIDAR ping en 192.168.0.1
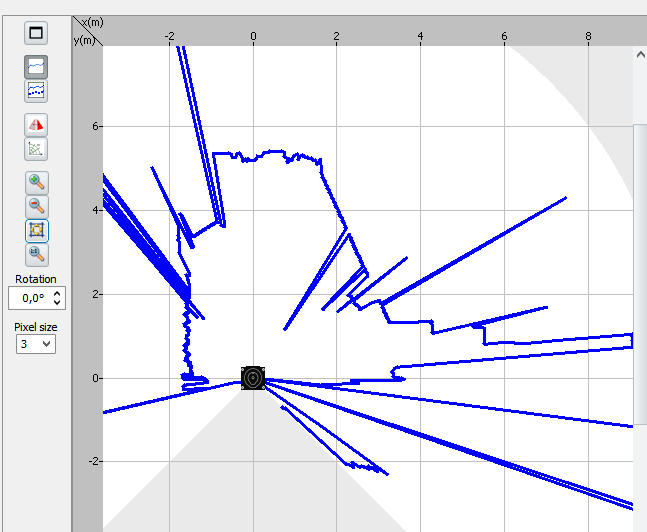
Ci-dessous la première capture de sa salle à manger avec le soft fourni par Sick (sous Windows). On retrouve le mur en biais, le couloir, la bouteille d’eau sur la table, …
Même s’il reste beaucoup de travail pour développer le driver de communication et l’interfacer dans notre architecture CRLG, c’est plutôt bien parti et ça marche bien.
Quelques infos :
Alimentation en 12V
Consommation : 250mA environ
Dialogue sur Ethernet (à priori par socket TCP)
Balayage de -45° à +225°