Avancement de GrosBot avant la fin d’année
Petit point d’avancement de GrosBot avant de clore l’année.
Modules lunaires
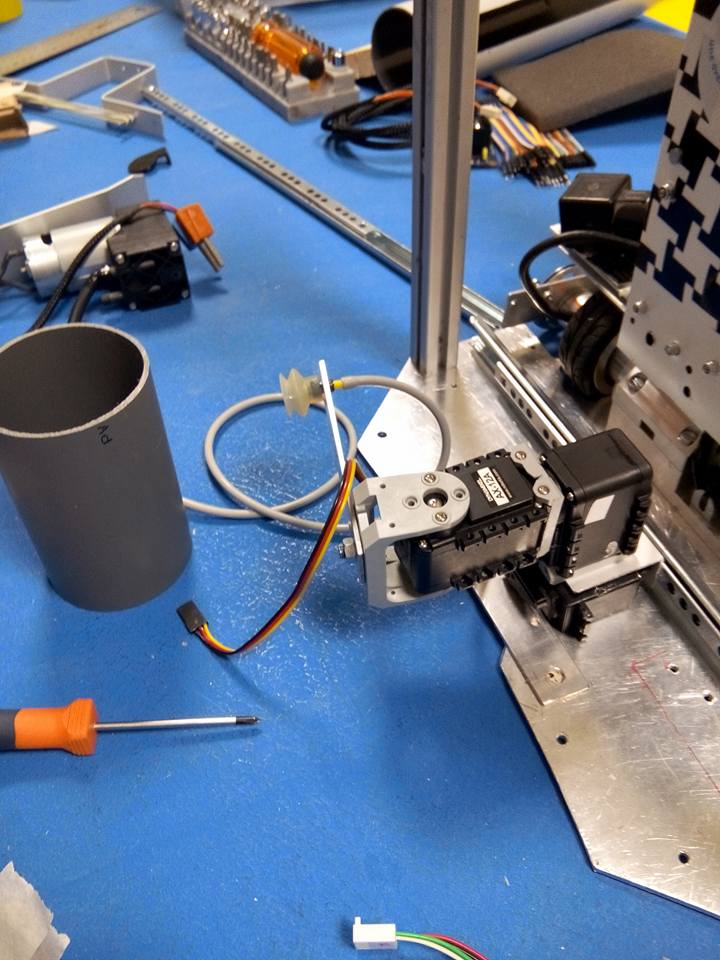
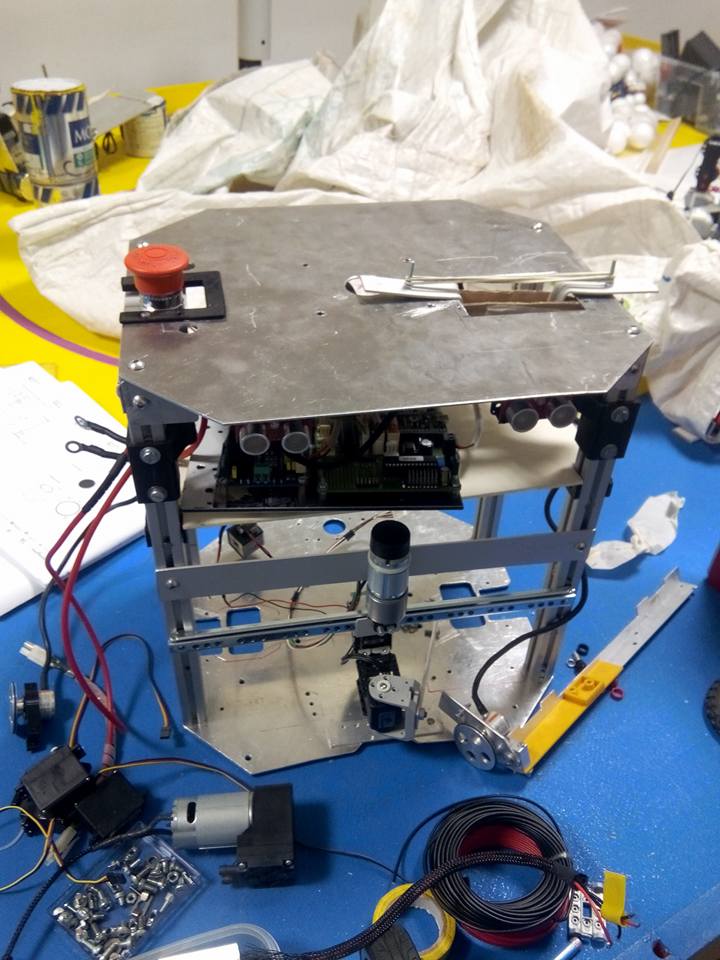
On a décidé que GrosBot s’occuperait des modules lunaires du côté. Sans dévoiler toute la stratégie, il fallait concevoir un système de préhension avec un débattement de plus de 20cm. Ré-exploiter notre système de courroie crantée de 2015 n’était pas envisageable: trop lent, pas assez précis.
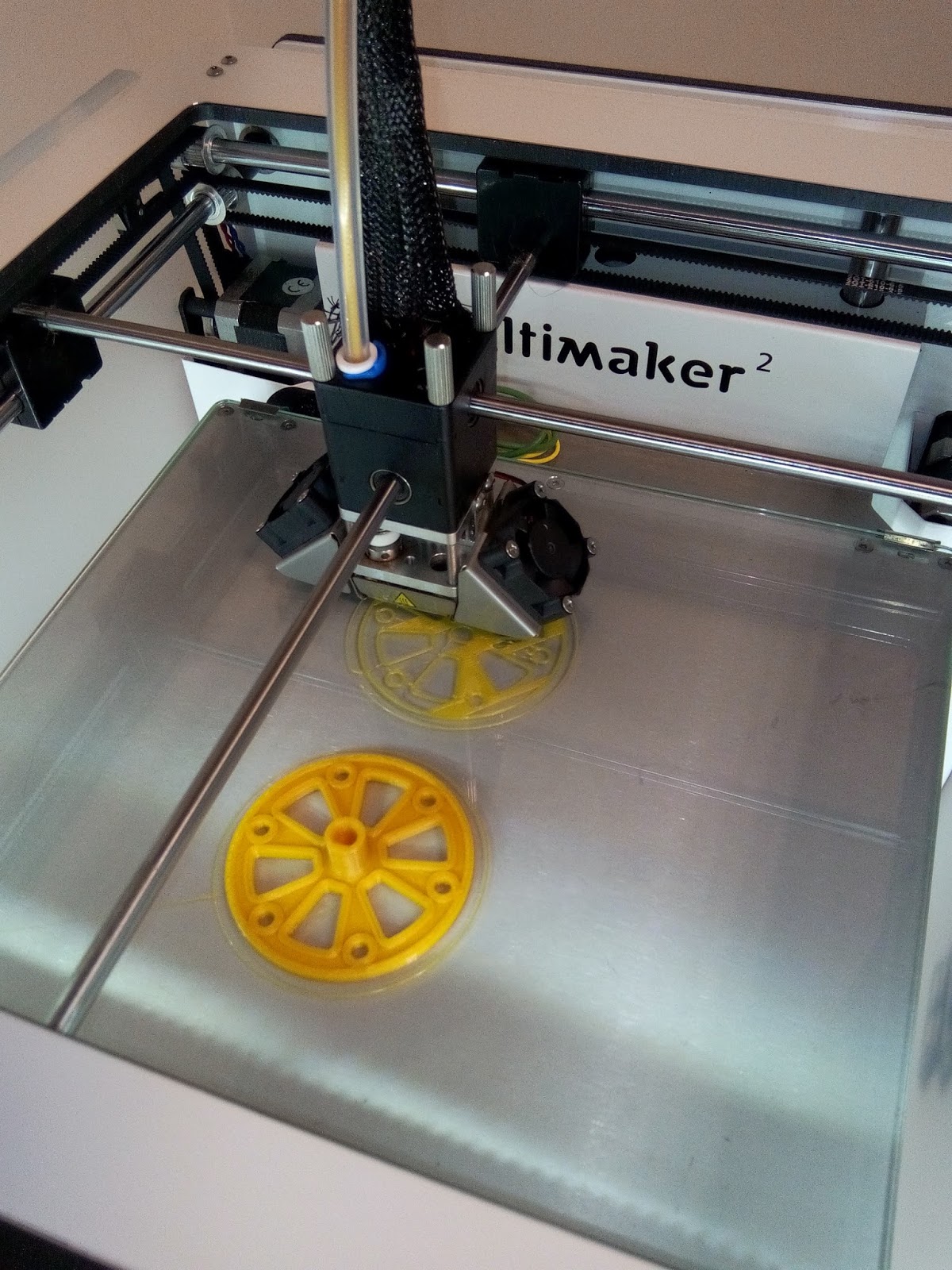
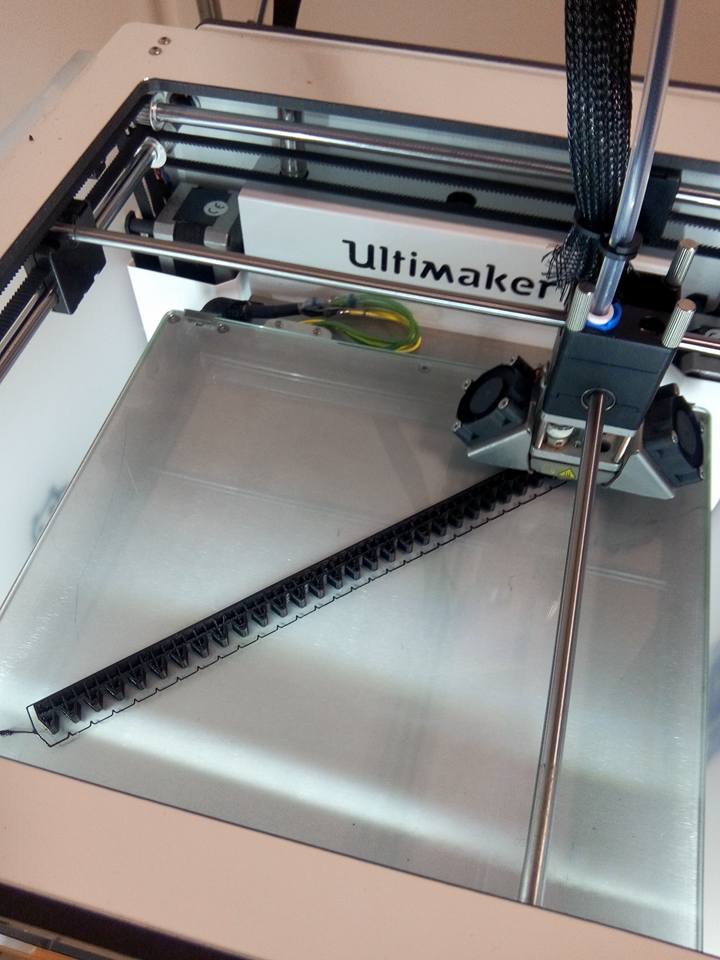
Je me suis donc rabattu sur une simple glissière IKEA munie d’une crémaillère. La crémaillère et le pignon ont été réalisés à l’imprimante 3D. Le dispositif est complété par une ventouse sur un système à plusieurs axes.
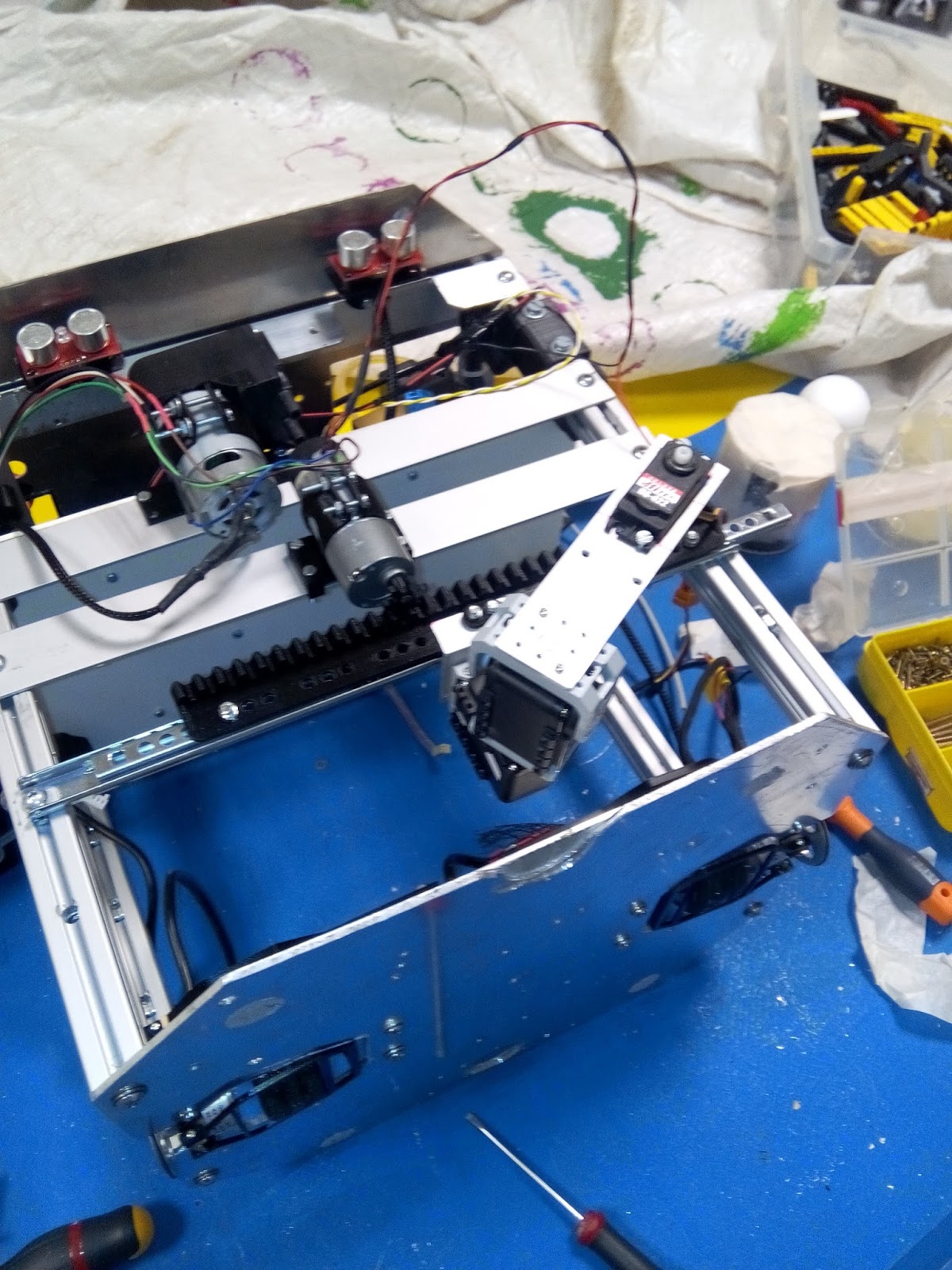
Des premiers essais:




au résultat final:
Funny action
Beaucoup d’idées au départ, mais la plupart tournaient autour d’un système de catapulte. Beaucoup de réglages, un objet qui partait haut mais ne restait pas longtemps en l’air (merci la gravité 🙂 ). Je pensai à un petit parachute comme les jouets avec les soldats en plastique mais c’est en voyant brickstory faire des essais avec les balles en polystyrene que j’ai repensé à notre fontaine à balle (effet complétement involontaire) lorsqu’on voulait prendre les popcorns dans le tube de distribution.
Il a fallu quelques essais pour trouver le système le plus stable. Comme ça devait représenter le lancement d’un engin spatial et que Rogue One devait bientôt sortir, j’ai customisé la balle en étoile de la mort. Je suis assez content de l’effet rendu:
Roche lunaire
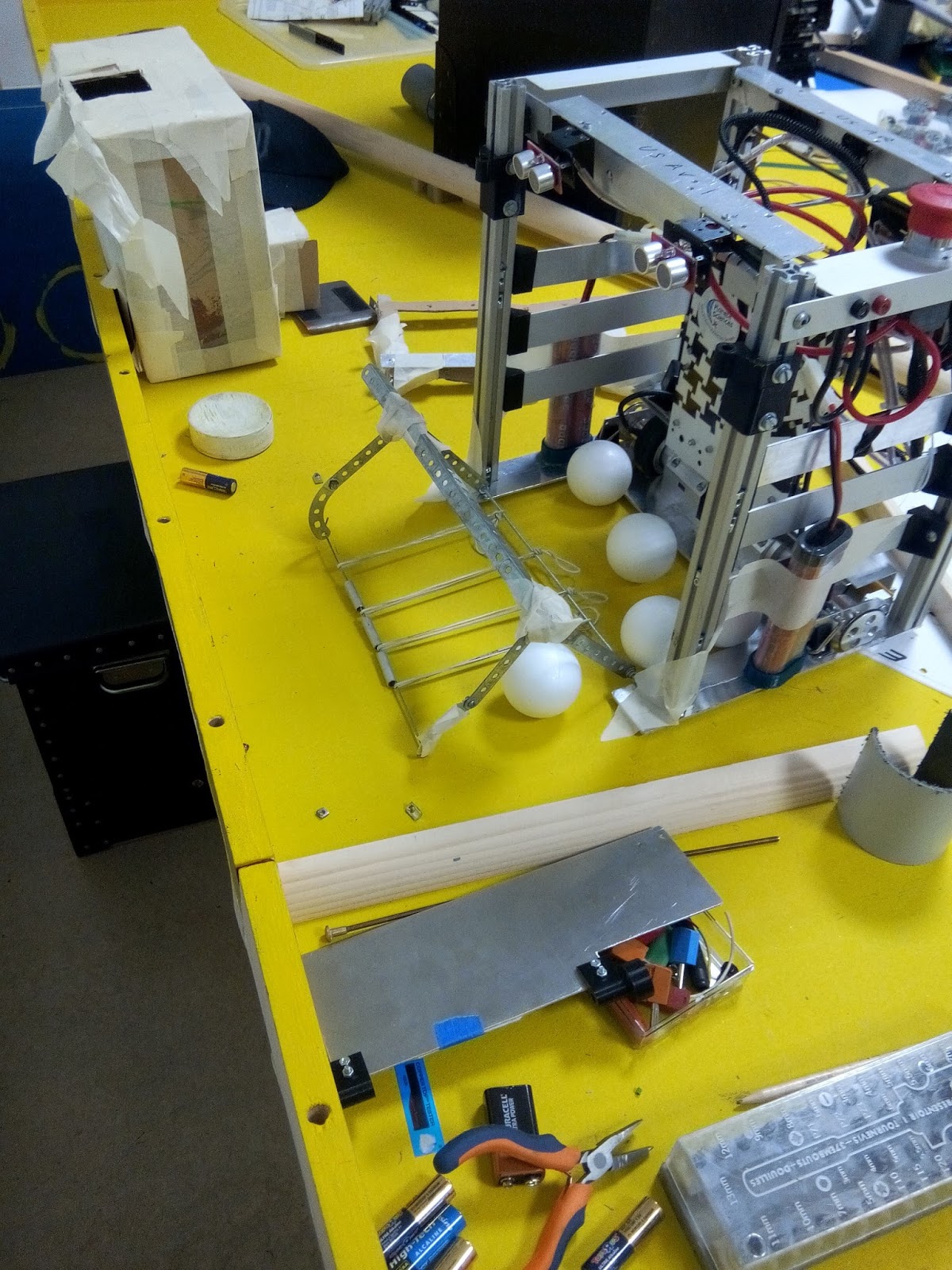
Quelques systèmes mécaniques de préhension ont été testés mais c’est peu efficace et avec le risque de tanquer le robot dans les plats délimitant les cratères.
Exemple de système testé:


Je me suis donc tourné vers un système d’aspiration (récupération du moteur de sèche cheveux utilisé l’année dernière). Résultat des courses, c’est peu efficace: le flux d’air n’est pas assez important et le réceptacle fermé occasionne trop de pertes de charge. On testera à la rentrée avec une turbine puissante de modélisme et un système ouvert!
Exemple de test d’aspiration (autant la prendre avec une pince!):
Améliorations en tout genre
Nous ne nous limitons pas aux actions du règlement. A chaque coupe c’est l’occasion de parfaire notre base robotique ou tester d’autres façons de faire.
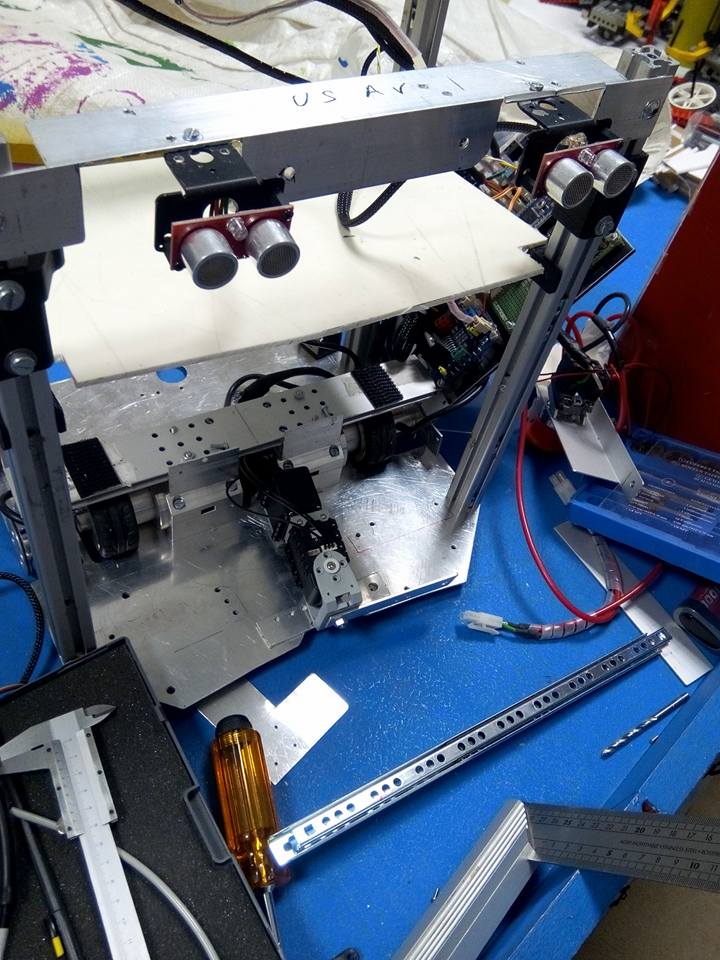
Base roulante
Nous avons donc profiter de cette année pour améliorer nos supports codeurs (on voit l’influence du monde automobile):

Quoiqu’il se passe (démontage, choc,…) l’alignement codeur-roue est garanti, ainsi que l’entraxe roues et codeurs. Par ailleurs, il y a deux élastiques et 4 vis à retirer pour intervenir sur la base roulante, c’est un peu les vacances en cas de maintenance! 🙂
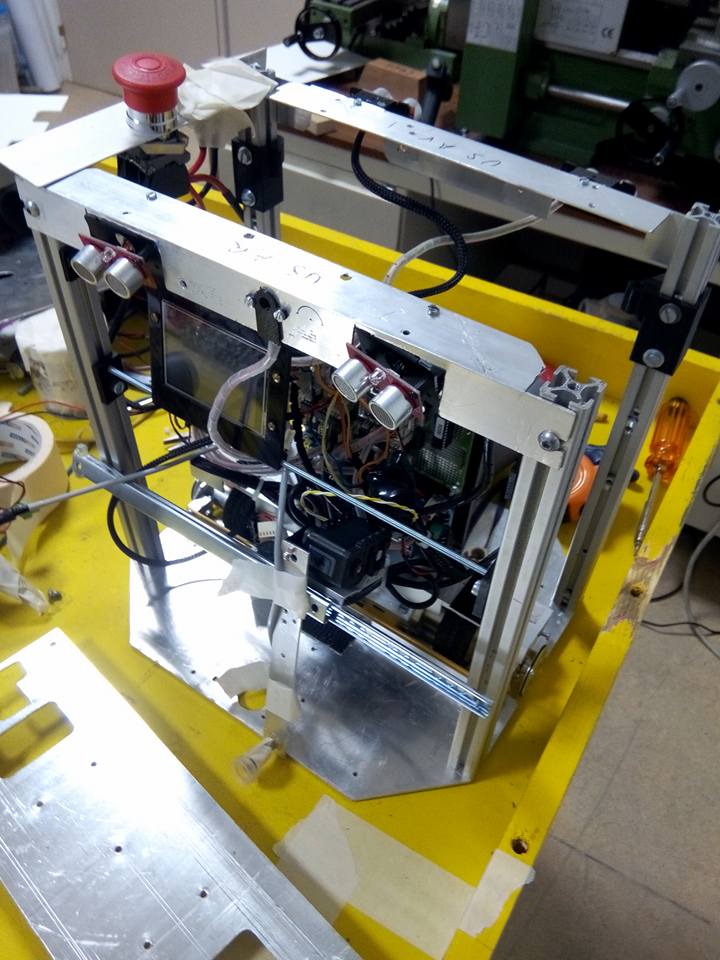
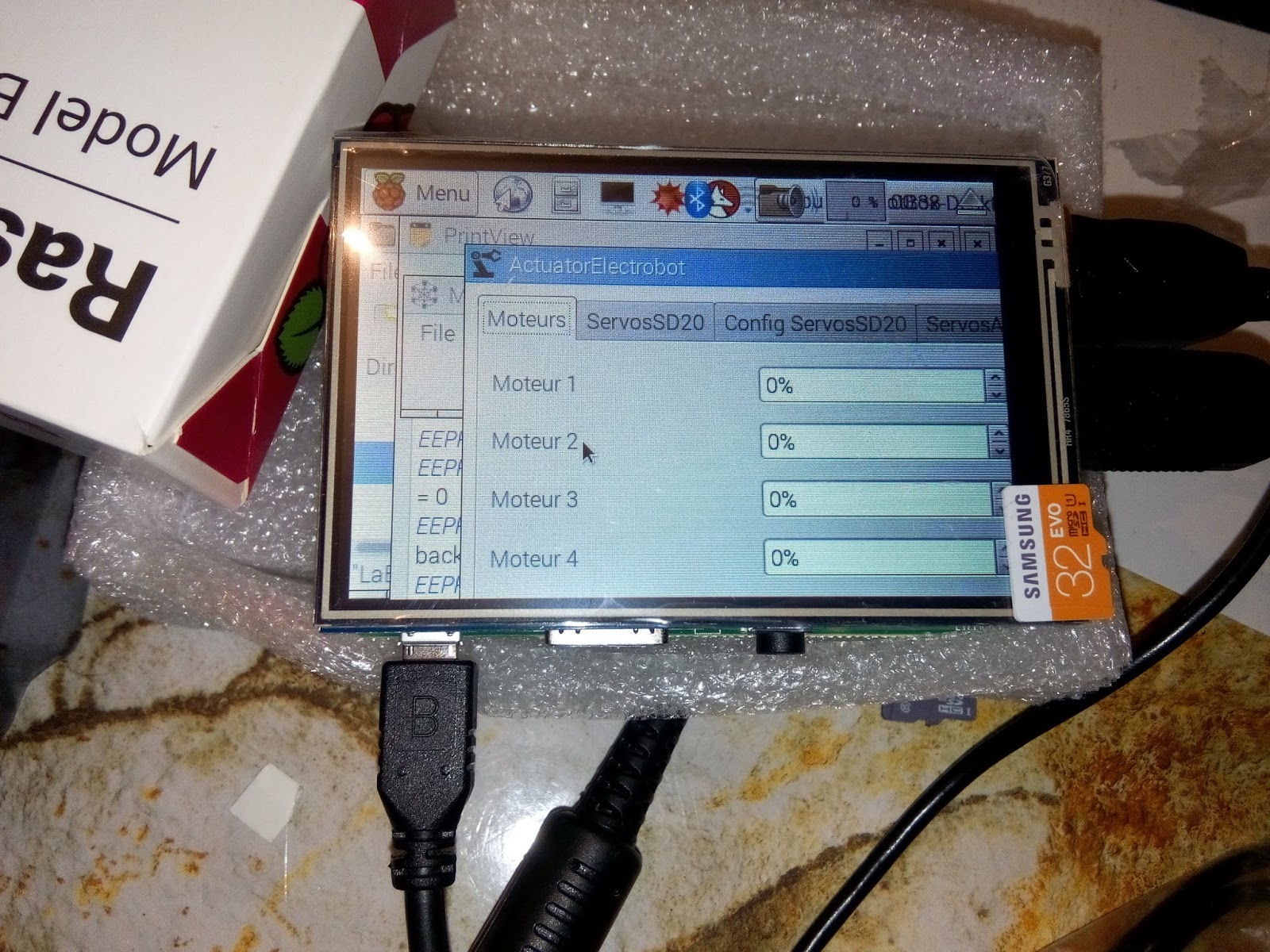
IHM
Nous avions une IHM avec un montage écran 4D System et une liaison série. C’était sympa mais très compliqué à mettre à jour à chaque saison (refaire l’IHM, maîtriser un autre environnement de dev,…). Nico a eu l’excellente idée de partir d’un raspberry PI 3 et d’un écran tactile HDMI pour faire tourner notre soft de mise au point LaBotBox développé sous Qt.
Nous avons donc maintenant un écran qui est modifiable à volonté en ne maîtrisant qu’une seule chaine de dev (en l’occurence QtCreator), qui peut faire passerelle pour télécharger notre soft sur le mbed (plus besoin de connecter un fil) et qui est communiquant via ssh pour faire du débug in situ en restant peinard dans son fauteuil! La classe!
Nico après la mise au point du système pour MiniBot et GrosBot:

Les Têtes Fabriquées:
Les enfants ne sont pas en reste et mon petit doigt (et l’imprimante 3D) me dit que les vacances vont être propices à la mécanique.
Impression des supports de roue, dessinés par Erwann (12 ans):