
Nouvelle année, nouveaux défis!
Après quelques mois de silence, toute l’équipe CRLG annonce une fois de plus sa participation à la coupe de France. 🙂 Avec une petite différence notable: à l’instar de nos copains BrickStory, nous changeons de nom, CRLG devient ThalBot (comprenne qui pourra 😉 ).
Les Trophées de la Robotique
Nous continuons à encadrer les Têtes Fabriquées pour les Trophées de la Robotique. Parce que les échéances sont plus proches ils ont déjà commencé le boulot.
Après un rapide partage des tâches, chaque petit groupe s’affaire:
- conception du panneau domotique
- conception de l’abeille
- dépouillement du gros robot 2017 (l’expérience permet de la réutilisation d’anciennes réalisations 🙂 )
- conception du petit robot autonome
- concertation sur la stratégie

- apprentissage et maîtrise de la conception 3D (Freecad et utilisation de la RepRap)
- amélioration diverse (exemple de la roue 2.0 avec l’écrou piégé qui permet d’éviter « l’usinage » de la roue par le méplat de l’arbre moteur)

Bilan:
le petit robot est fonctionnel (bien qu’à l’aspect un peu bordélique). Prochaine étape programmation du suivi de ligne noire.
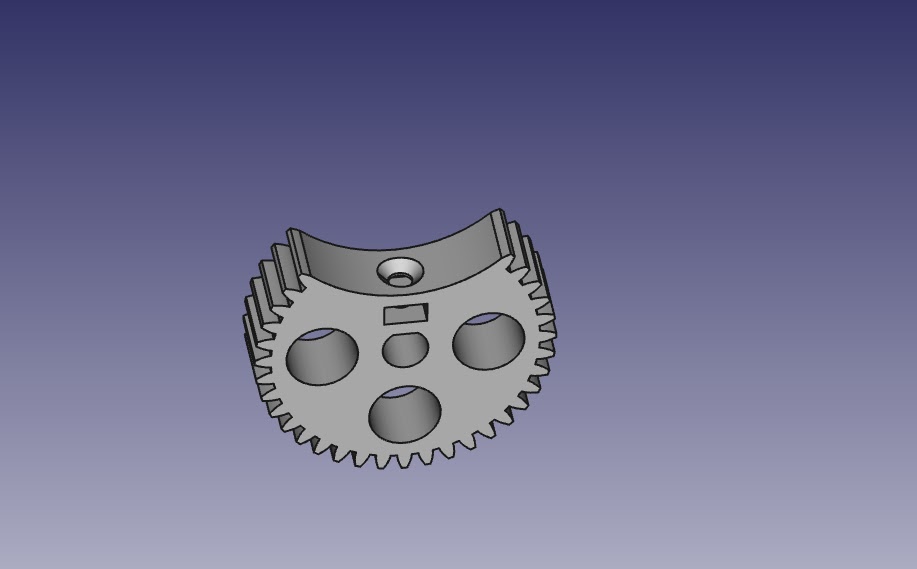
le robot principal s’occupera des cubes et des balles. Un système balistique à base de catapulte est en cours de réalisation. Petite partie de la solution pour transformer une rotation continue en système de réarmement d’une catapulte:
Une réunion fin janvier de l’équipe complète devrait harmoniser les efforts et sera l’occasion de faire un bilan avant la finale régionale.
La coupe de France
L’équipe ne fait pas que changer de nom, elle voit son effectif opérationnel réduit! Nous avons donc décidé d’aligner un unique robot qui aura néanmoins la prétention de s’occuper des cubes et des balles.
Le système de balistique
Sans grosse surprise nous optons pour le système efficace de la balle légèrement pincée entre deux roues extrêmement véloces. Nous améliorons un tantinet le système en ne prenant qu’une roue motorisée le rest du pincement est assuré par des roulements à billes (qu’une vitesse de roue à gérer pour régler la balistique et système sûrement plus compact):
Le système de convoyage des balles sera en fil de fer comme les anciens tunnels de flipper:

Prendre et empiler les cubes
Le système est en 2 parties:
Une pince pour saisir les cubes (trop de mauvaises surprises avec les ventouses et les cubes de 2016). La difficulté était d’avoir une pince qui se ferme avec deux bras en translation et assez compacte (donc en privilégiant un actionneur):

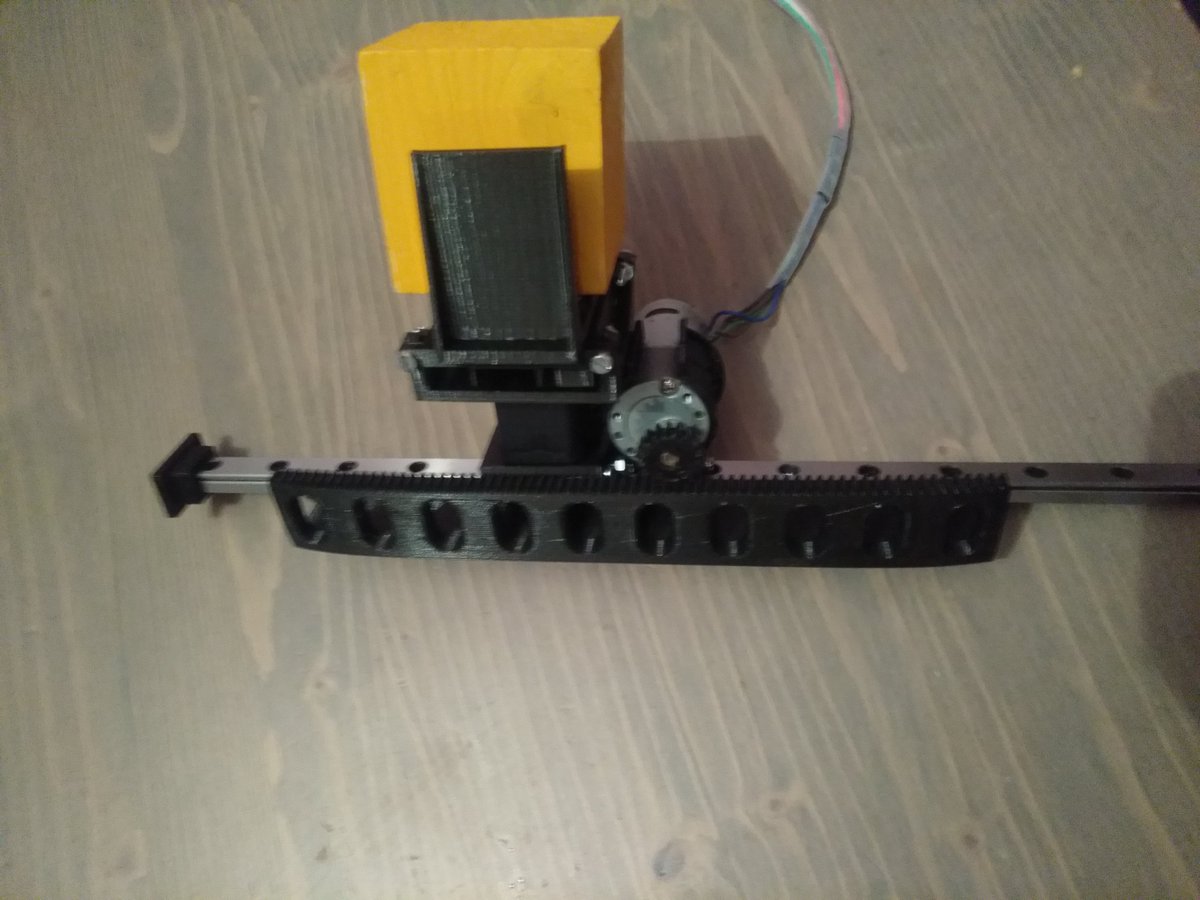
L’autre partie du système est un ascenseur avec un crémaillère et un moteur asservi en position (codeur sur l’arbre moteur). Un clapet anti retour permet de retenir les cubes récupéré. A la fin on ouvre une porte pour retirer le clapet anti-retour pour libérer la pile de cubes:
Le soft
Nous ne sommes pas en reste coté software, en vrac:
- Création d’une distribution customisée d’ubuntu (aka Robuntu) pour que chaque membre ait le même environnement de développement uniformisé (sur clef usb ou installé)
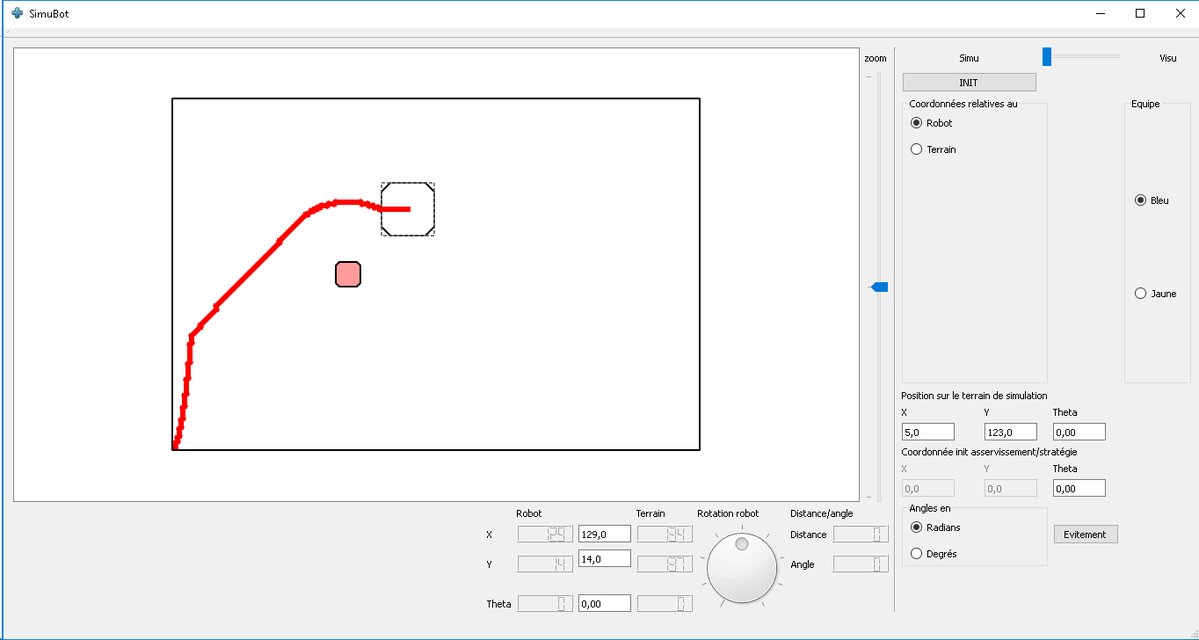
- Implémentation de A* et modification de l’asservissement pour suivre une suite de points de façon fluide (on espère faire mieux en évitement que les attentes interminables devant un robot adverse):
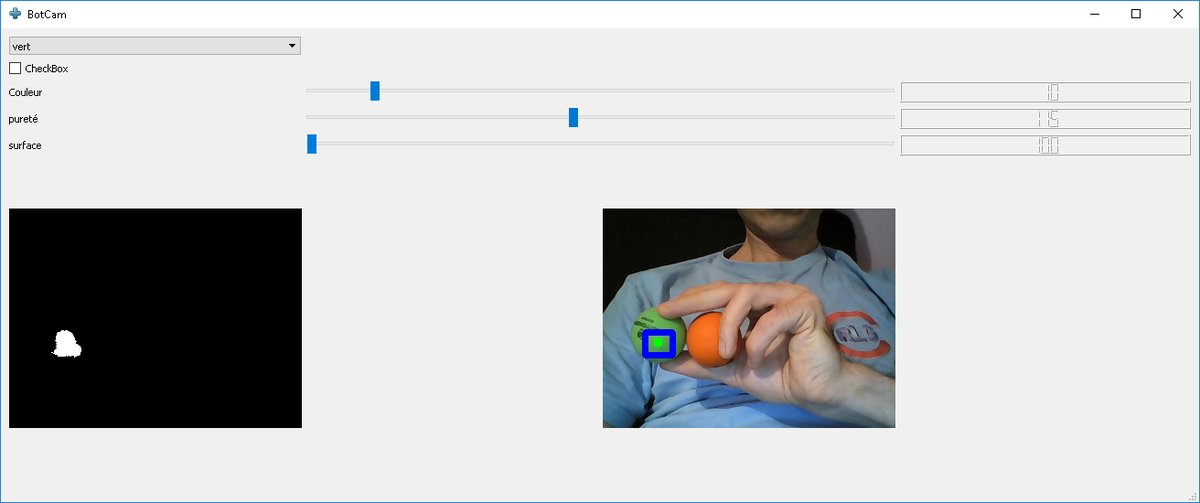
- Récupération et intégration au soft du raspberry pi de notre soft legacy de traitement d’image avec OpenCV:
- Et on continue notre développement de stratégie avec Yakindu SCT car il n’y a pas de raison de changer une équipe qui gagne (si-si parfois on gagne :-p ):
Bref on ne manque pas de taff… et de quoi s’amuser! 🙂