
Avancement coupe – novembre 2018!
Aujourd’hui, un point d’avancement de nos idées et travaux en cours.

GrosBot:
- explications du principe général pour récupérer les atomes, les stocker et les restituer (accélérateur ou balance)
- test d’actionneur pour manipuler les atomes. Ouch, le servo soulève bien le goldenium mais ça consomme un max (600 mA)
- test de caméra sur les visuels du terrain
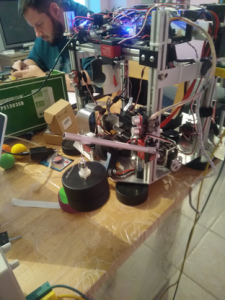
Test pour lever le goldenium!
MiniBot
- réflexion sur la base roulante
- démo du principe de prise d’atomes

La base roulante de MiniBot (sur papier 🙂 )!
Expérience:
- proposition de prototype d’électron
- échange sur l’expérience, ce sera notre duo de choc, Alex et Nico qui s’en occuperont
Travaux pour le club
- Nico nous a fait une démo de la brique logicielle pour piloter les servos dynamixel et surtout avoir le retour d’info. Ce la nécessitera l’ajout d’une petite carte électronique sur notre PCB maison.

La carte additionnelle pour piloter les servos dynamixel.
- autre démo de notre prolifique Nico: l’emploi de nos dépôts GitHub qui gèrent maintenant les configurations PC, raspberry et mbed.